
йҐДжµЛзЉЦз†БдєЛеЄІйЧійҐДжµЛпЉИInter-Picture¬†PredictionпЉЙ
¬† ¬† ¬† еЄІйЧійҐДжµЛжШѓжМЗеИ©зФ®иІЖйҐСжЧґйЧіеЯЯзЫЄеЕ≥жАІпЉМдљњзФ®дЄіињСеЈ≤зЉЦз†БеЫЊеГПеГПзі†йҐДжµЛељУеЙНеЫЊеГПзЪДеГПзі†пЉМдї•иЊЊеИ∞жЬЙжХИеОїйЩ§иІЖйҐСжЧґеЯЯеЖЧдљЩзЪДзЫЃзЪДгАВзФ±дЇОиІЖйҐСеЇПеИЧйАЪеЄЄеМЕжЛђиЊГеЉЇзЪДжЧґеЯЯзЫЄеЕ≥жАІпЉМеЫ†ж≠§йҐДжµЛжЃЛеЈЃеАЉжО•ињСдЇО0пЉМе∞ЖжЃЛеЈЃдњ°еПЈдљЬдЄЇеРОзї≠ж®°еЭЧзЪДиЊУеЕ•ињЫи°МеПШжНҐгАБйЗПеМЦгАБжЙЂжППеПКзЖµзЉЦз†БпЉМеПѓеЃЮзО∞еѓєиІЖйҐСдњ°еПЈзЪДйЂШжХИеОЛзЉ©гАВ
дЄАгАБеЄІйЧійҐДжµЛзЉЦз†БеОЯзРЖ
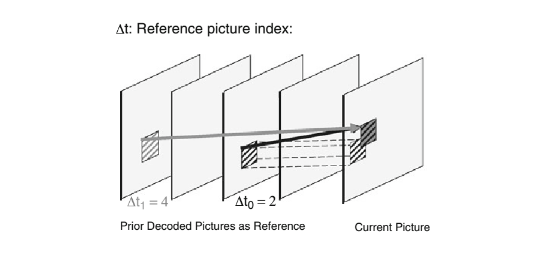
¬† ¬† ¬† зЫЃеЙНдЄїи¶БзЪДиІЖйҐСзЉЦз†Бж†ЗеЗЖеЄІйЧійҐДжµЛйГ®еИЖйГљйЗЗзФ®дЇЖеЯЇдЇОеЭЧзЪДињРеК®и°•еБњжКАжЬѓпЉМе¶ВдЄЛеЫЊжЙАз§ЇпЉМеЕґеЯЇжЬђеОЯзРЖдЄЇпЉЪељУеЙНеЫЊеГПзЪДжѓПдЄ™еГПзі†еЭЧеЬ®дєЛеЙНеЈ≤зЉЦз†БеЫЊеГПдЄ≠еѓїжЙЊдЄАдЄ™жЬАдљ≥еМєйЕНеЭЧпЉМиѓ•ињЗз®ЛзІ∞дЄЇињРеК®дЉ∞иЃ°MEпЉИMotion¬†EstimationпЉЙгАВеЕґдЄ≠зФ®дЇОйҐДжµЛзЪДеЫЊеГПзІ∞дЄЇеПВиАГеЫЊеГПпЉМеПВиАГеЭЧеИ∞ељУеЙНеГПзі†еЭЧзЪДдљНзІїзІ∞дЄЇињРеК®еРСйЗПMVпЉИMotion¬†VectorпЉЙпЉМељУеЙНеГПзі†еЭЧдЄОеПВиАГеЭЧзЪДеЈЃеАЉзІ∞дЄЇйҐДжµЛжЃЛеЈЃпЉИPrediction¬†ResidualпЉЙгАВе∞ЖжЃЛеЈЃдњ°еПЈдљЬдЄЇеРОзї≠ж®°еЭЧзЪДиЊУеЕ•ињЫи°МеПШжНҐгАБйЗПеМЦгАБжЙЂжППеПКзЖµзЉЦз†БпЉМеПѓеЃЮзО∞еѓєиІЖйҐСдњ°еПЈзЪДйЂШжХИеОЛзЉ©гАВж†єжНЃињРеК®зЯҐйЗПMVпЉМе∞ЖеЙНдЄАеЄІпЉИжИЦеЙНеЗ†еЄІгАБеРОеЗ†еЄІпЉЙзЪДињРеК®дљНзІїеЭЧеЫЊеГПеБЪзЫЄеЇФзЪДдљНзІїеЊЧеИ∞ељУеЙНеЄІељУеЙНеЭЧзЪДињРеК®йҐДжµЛдЉ∞иЃ°еАЉпЉМињЩж†Је∞±еПѓдї•еЊЧеИ∞ељУеЙНеЄІзЪДеЄІйЧійҐДжµЛеЄІпЉМињЩдЄАињЗз®ЛзІ∞дЄЇињРеК®и°•еБњMCпЉИMotion¬†CompensationпЉЙгАВ
¬† ¬† ¬† йЬАи¶Бж≥®жДПзЪДжШѓпЉЪињРеК®дЉ∞иЃ°еЊЧеИ∞зЪДињРеК®зЯҐйЗПдЄНеП™зФ®дЇОињРеК®и°•еБњпЉМиАМдЄФињШ襀䊆йАБиЗ≥иІ£з†БеЩ®дЄ≠пЉМиІ£з†БеЩ®ж†єжНЃињРеК®зЯҐйЗПзїПињЗињРеК®и°•еБњеПѓдї•еЊЧеИ∞еТМзЉЦз†БзЂѓеЃМеЕ®зЫЄеРМзЪДйҐДжµЛеЫЊеГПпЉМдїОиАМеЃЮзО∞ж≠£з°ЃеЫЊеГПиІ£з†БгАВ
¬† ¬† ¬† еЕґеЃЮпЉМеЄІеЖЕйҐДжµЛеТМеЄІйЧійҐДжµЛжЬЙеЊИе§Ъз±їдЉЉзЪДеЬ∞жЦєпЉМеП™дЄНињЗеЄІеЖЕйҐДжµЛжЙАйЗЗзФ®зЪДеПВиАГеГПзі†жЭ•жЇРдЇОељУеЙНеЄІеЈ≤зЉЦз†БзЪДеГПзі†еАЉпЉМиАМеЄІйЧійҐДжµЛзЪДеПВиАГеГПзі†жЭ•жЇРдЇОеЈ≤зЉЦз†БзЪДеЙНдЄАеЄІпЉИжИЦеЙНеЗ†еЄІгАБеРОеЗ†еЄІпЉЙгАВз±їдЉЉдЇОеЄІйЧійҐДжµЛдЄ≠зЉЦз†БеЩ®йЬАи¶Бе∞ЖињРеК®зЯҐйЗПMVдЉ†зїЩиІ£з†БзЂѓпЉМиІ£з†БзЂѓж†єжНЃињРеК®зЯҐйЗПеПѓдї•иОЈеПЦеТМзЉЦз†БзЂѓеЃМеЕ®зЫЄеРМзЪДйҐДжµЛеЭЧпЉЫеЬ®еЄІеЖЕзЉЦз†Бж®°еЉПдЄЛпЉМзЉЦз†БеЩ®йЬАи¶БжККеЃЮйЩЕйЗЗзФ®зЪДеЄІеЖЕйҐДжµЛж®°еЉПдњ°жБѓдЉ†зїЩиІ£з†БеЩ®пЉМиІ£з†БзЂѓеПѓдї•ж†єжНЃињЩдЄ™йҐДжµЛж®°еЉПдњ°жБѓиОЈеЊЧдЄОзЉЦз†БеЩ®еЃМеЕ®зЫЄеРМзЪДеЄІеЖЕйҐДжµЛеЭЧгАВзФ±ж≠§еПѓиІБпЉМињРеК®зЯҐйЗПеТМеЄІеЖЕйҐДжµЛж®°еЉПжЬЙзЭАеЃМеЕ®зЫЄеРМзЪДйЗНи¶БжАІпЉМеЃГдїђйГљеЬ®еЃПеЭЧе§ідЄ≠зФ®зЙєеЃЪзЪДиѓ≠ж≥ХеЕГзі†и°®з§ЇгАВ
дЇМгАБеЄІйЧійҐДжµЛзЉЦз†БзЪДеЕ≥йФЃжКАжЬѓ
¬† ¬† ¬† еЬ®еЄІйЧійҐДжµЛзЉЦз†БињЗз®ЛдЄ≠пЉМжЬАйЗНи¶БзЪДжУНдљЬе∞±жШѓињРеК®дЉ∞иЃ°гАБMVйҐДжµЛдї•еПКе§ЪеПВиАГеЄІеТМеК†жЭГйҐДжµЛпЉМдЄЛйЭҐеѓєеЃГдїђдЄАдЄАињЫи°МеИЖжЮРгАВ
1гАБињРеК®дЉ∞иЃ°
¬† ¬† ¬† жЙАи∞УињРеК®дЉ∞иЃ°MEе∞±жШѓжМЗжПРеПЦељУеЙНеЫЊеГПињРеК®дњ°жБѓзЪДињЗз®ЛгАВеЬ®ињРеК®дЉ∞иЃ°дЄ≠пЉМеЄЄиІБзЪДињРеК®и°®з§Їж≥ХдЄїи¶БеМЕжЛђпЉЪеЯЇдЇОеГПзі†зЪДињРеК®и°®з§Їж≥ХгАБеЯЇдЇОеМЇеЯЯзЪДињРеК®и°®з§Їж≥ХеТМеЯЇдЇОеЭЧзЪДињРеК®и°®з§Їж≥ХгАВ
пЉИ1пЉЙгАБеЯЇдЇОеГПзі†зЪДињРеК®и°®з§Їж≥ХпЉЪзЫіжО•дЄЇжѓПдЄ™еГПзі†жМЗеЃЪдЄАдЄ™ињРеК®еРСйЗПгАВж≠§ж≥ХжЩЃйБНйАВзФ®пЉМдљЖжШѓйЬАи¶БдЉ∞иЃ°еЗЇе§ІйЗПзЪДжЬ™зЯ•йЗПпЉМиАМдЄФеЕґиІ£йАЪеЄЄдЄНиГљеПНжШ†еЬЇжЩѓдЄ≠зЙ©дљУзЬЯеЃЮзЪДињРеК®жГЕеЖµпЉМж≠§е§ЦпЉМиѓ•жЦєж≥ХйЬАи¶БдЄЇжѓПдЄАдЄ™еГПзі†йЩДеК†дЉ†йАБдЄАдЄ™MVпЉМжХ∞жНЃйЗПеЊИйЂШгАВ
пЉИ2пЉЙгАБеЯЇдЇОеМЇеЯЯзЪДињРеК®и°®з§Їж≥ХпЉЪжККдЄАеєЕеЫЊеГПеИЖдЄЇе§ЪдЄ™еМЇеЯЯпЉМдљњеЊЧжѓПдЄ™еМЇеЯЯжБ∞е•љи°®еЊБдЇЖдЄАдЄ™еЃМжХізЪДињРеК®зЙ©дљУгАВж≠§ж≥ХйїШиЃ§жѓПдЄ™еМЇеЯЯдЄ≠зЪДеГПзі†еЕЈжЬЙзЫЄеРМзЪДињРеʮ嚥еЉПпЉМйАВзФ®дЇОеМЕеРЂе§ЪдЄ™ињРеК®зЙ©дљУзЪДеЬЇжЩѓпЉМзДґиАМпЉМињРеК®зЙ©дљУзЪД嚥зКґеЊАеЊАжШѓдЄНиІДеИЩзЪДпЉМеЫ†ж≠§еМЇеЯЯеИТеИЖйЬАи¶Бе§ІйЗПзЪДдњ°жБѓжЭ•и°®еЊБпЉМиАМдЄФеЗЖз°ЃзЪДеИТеИЖжЦєеЉПйЬАи¶Бе§ІйЗПзЪДиЃ°зЃЧжЙНиГљз°ЃеЃЪпЉМеЫ†иАМеЯЇдЇОеМЇеЯЯзЪДи°®з§Їж≥ХеЬ®еЃЮйЩЕдЄ≠иЊГе∞СдљњзФ®гАВ
пЉИ3пЉЙгАБеЯЇдЇОеЭЧзЪДињРеК®и°®з§Їж≥ХпЉЪе∞ЖеЫЊеГПеИЖжИРдЄНеРМе§Іе∞ПзЪДеГПзі†еЭЧпЉМеП™и¶БеЭЧе§Іе∞ПеРИйАВпЉМеИЩеРДдЄ™еЭЧзЪДињРеʮ嚥еЉПеПѓдї•зЬЛжИРжШѓзїЯдЄАзЪДпЉМеРМжЧґжѓПдЄ™еЭЧзЪДињРеК®еПВжХ∞еПѓдї•зЛђзЂЛеЬ∞ињЫи°МдЉ∞иЃ°гАВж≠§ж≥ХеЕЉй°ЊдЇЖињРеК®дЉ∞иЃ°з≤ЊеЇ¶еТМе§НжЭВеЇ¶пЉМеЬ®дЇМиАЕдєЛйЧіињЫи°МдЇЖдЄАдЄ™жКШдЄ≠пЉМеЫ†ж≠§иѓ•жЦєж≥ХжШѓиІЖйҐСзЉЦз†БеЫљйЩЕж†ЗеЗЖдЄ≠зЪДж†ЄењГжКАжЬѓгАВ
¬† ¬† ¬† еЯЇдЇОеЭЧзЪДињРеК®дЉ∞иЃ°жЦєж≥ХжЬЙдЄЙдЄ™ж†ЄењГйЧЃйҐШйЬАи¶БзЙєеИЂж≥®жДПгАВдЄАжШѓињРеК®дЉ∞иЃ°зЪДеЗЖеИЩпЉЫдЇМжШѓжРЬ糥зЃЧж≥ХпЉЫдЄЙжШѓдЇЪеГПзі†з≤ЊеЇ¶ињРеК®дЉ∞иЃ°гАВ
1.1гАБињРеК®дЉ∞иЃ°еЗЖеИЩ
¬† ¬† ¬† ињРеК®дЉ∞иЃ°зЪДзЫЃзЪДжШѓдЄЇељУеЙНеЭЧеЬ®еПВиАГеЫЊеГПдЄ≠еѓїжЙЊдЄАдЄ™жЬАдљ≥еМєйЕНеЭЧпЉМеЫ†ж≠§йЬАи¶БдЄАдЄ™еЗЖеИЩжЭ•еИ§еЃЪдЄ§дЄ™еЭЧзЪДеМєйЕНз®ЛеЇ¶гАВеЄЄзФ®зЪДеМєйЕНеЗЖеИЩдЄїи¶БжЬЙжЬАе∞ПеЭЗжЦєиѓѓеЈЃMSEпЉИMean¬†Square¬†ErrorпЉЙгАБжЬАе∞Пеє≥еЭЗзїЭеѓєиѓѓеЈЃMADпЉИMean¬†Absolute¬†DifferenceпЉЙеТМжЬАе§ІеМєйЕНеГПзі†жХ∞MPCпЉИMatching-Pixel¬†CountпЉЙз≠ЙгАВ
¬† ¬† ¬† дЄЇдЇЖзЃАеМЦиЃ°зЃЧпЉМдЄАиИђзФ®зїЭеѓєиѓѓеЈЃеТМSADпЉИSum¬†of¬†Absolute¬†DifferenceпЉЙжЭ•дї£жЫњMADгАВж≠§е§ЦпЉМжЬАе∞ПеПШжНҐеЯЯзїЭеѓєиѓѓеЈЃеТМSATDпЉИSum¬†of¬†Absolute¬†Transformed¬†DifferenceпЉЙдєЯжШѓдЄАзІНжАІиГљдЉШеЉВзЪДеМєйЕНеЗЖеИЩгАВ
1.2гАБжРЬ糥зЃЧж≥Х
¬† ¬† ¬† еЬ®жЯРдЇЫеЇФзФ®зОѓеҐГдЄЛпЉМиІЖйҐСзЉЦз†БдЉ†иЊУеѓєеЃЮжЧґжАІи¶Бж±ВиЊГйЂШпЉМиАМињРеК®дЉ∞иЃ°зЪДињРзЃЧе§НжЭВеЇ¶йАЪеЄЄиЊГйЂШпЉМеЫ†ж≠§йЂШжАІиГљгАБдљОе§НжЭВеЇ¶зЪДињРеК®жРЬ糥зЃЧж≥ХжШЊеЊЧе∞§дЄЇйЗНи¶БгАВ
¬† ¬† ¬† еЄЄзФ®зЪДжРЬ糥зЃЧж≥ХжЬЙпЉЪеЕ®жРЬ糥зЃЧж≥ХгАБдЇМзїіеѓєжХ∞жРЬ糥зЃЧж≥ХгАБдЄЙж≠•жРЬ糥зЃЧж≥Хз≠ЙгАВеЕ®жРЬ糥зЃЧж≥ХжШѓжМЗеѓєжРЬ糥з™ЧеЖЕжЙАжЬЙеПѓиГљзЪДдљНзљЃиЃ°зЃЧдЄ§дЄ™еЭЧзЪДеМєйЕНиѓѓеЈЃпЉМжЙАеЊЧзЪДжЬАе∞ПеМєйЕНиѓѓеЈЃеѓєеЇФзЪДMVдЄАеЃЪжШѓеЕ®е±АжЬАдЉШзЪДMVгАВ
¬† ¬† ¬† зДґиАМпЉМеЕ®жРЬ糥зЃЧж≥Хе§НжЭВеЇ¶жЮБйЂШпЉМжЧ†ж≥Хжї°иґ≥еЃЮжЧґзЉЦз†БгАВйЩ§еЕ®жРЬ糥зЃЧж≥Хе§ЦпЉМеЕґдљЩзЃЧж≥ХзїЯзІ∞дЄЇењЂйАЯжРЬ糥зЃЧж≥ХпЉМењЂйАЯжРЬ糥зЃЧж≥ХеЕЈжЬЙйАЯеЇ¶ењЂзЪДдЉШзВєпЉМдљЖжШѓеЕґжРЬ糥ињЗз®ЛеЃєжШУиРљеЕ•е±АйГ®жЬАдЉШзВєпЉМдїОиАМжЧ†ж≥ХжЙЊеИ∞еЕ®е±АжЬАдЉШзВєгАВдЄЇдЇЖйБњеЕНињЩдЄАзО∞и±°зЪДеПСзФЯпЉМйЬАи¶БеЬ®жРЬ糥зЃЧж≥ХдЄ≠зЪДжѓПдЄАдЄ™ж≠•й™§е∞љйЗПжРЬ糥жЫіе§ЪзЪДзВєпЉМзЫЄеЕ≥зЪДзЃЧж≥ХжЬЙJMдЄ≠зЪДUMHexagonSзЃЧж≥Хдї•еПКHMдЄ≠зЪДTZSearchзЃЧж≥ХгАВ
1.3гАБдЇЪеГПзі†з≤ЊеЇ¶ињРеК®дЉ∞иЃ°
¬† ¬† ¬† зФ±дЇОиЗ™зДґзХМзЙ©дљУињРеК®еЕЈжЬЙињЮзї≠жАІпЉМеЫ†ж≠§зЫЄйВїдЄ§еєЕеЫЊеГПдєЛйЧізЪДињРеК®дЄНдЄАеЃЪдї•жХіеГПзі†дЄЇеЯЇжЬђеНХдљНпЉМиАМжЬЙеПѓиГљдї•еНКеГПзі†гАБ1/4еГПзі†зФЪиЗ≥жШѓ1/8еГПзі†дЄЇеНХдљНгАВж≠§жЧґиЛ•дїЕдїЕдљњзФ®жХіеГПзі†з≤ЊеЇ¶ињРеК®дЉ∞иЃ°дЉЪеЗЇзО∞еМєйЕНдЄНеЗЖз°ЃзЪДйЧЃйҐШпЉМеѓЉиЗіињРеК®и°•еБњжЃЛеЈЃеєЕеЇ¶иЊГе§ІпЉМељ±еУНзЉЦз†БжХИзОЗгАВ
¬† ¬† ¬† дЄЇдЇЖиІ£еЖ≥дЄКињ∞йЧЃйҐШпЉМеЇФе∞ЖињРеК®дЉ∞иЃ°зЪДз≤ЊеЇ¶жПРеНЗеИ∞дЇЪеГПзі†зЇІеИЂпЉМињЩеПѓдї•йАЪињЗеѓєеПВиАГеЫЊеГПеГПзі†зВєињЫи°МжПТеАЉжЭ•еЃЮзО∞гАВ1/4еГПзі†з≤ЊеЇ¶зЫЄжѓФдЇО1/2еГПзі†з≤ЊеЇ¶жЧґзЪДзЉЦз†БжХИзОЗжЬЙжШОжШЊеЬ∞жПРйЂШпЉМдљЖжШѓ1/8еГПзі†з≤ЊеЇ¶зЫЄжѓФдЇО1/4еГПзі†з≤ЊеЇ¶жЧґзЪДзЉЦз†БжХИзОЗйЩ§дЇЖйЂШз†БзОЗжГЕеЖµдї•е§Цеєґж≤°жЬЙжШОжШЊеЬ∞жПРеНЗдЄФ1/8еГПзі†з≤ЊеЇ¶ињРеК®дЉ∞иЃ°жЫідЄЇе§НжЭВгАВеЫ†ж≠§зО∞жЬЙж†ЗеЗЖH.264дї•еПКHEVCйГљдљњзФ®дЇЖ1/4еГПзі†з≤ЊеЇ¶ињЫи°МињРеК®дЉ∞иЃ°гАВ
2гАБMVйҐДжµЛжКАжЬѓ
¬† ¬† ¬† еЬ®е§Іе§ЪжХ∞еЫЊеГПеТМиІЖйҐСдЄ≠пЉМдЄАдЄ™ињРеК®зЙ©дљУеПѓиГљдЉЪи¶ЖзЫЦе§ЪдЄ™ињРеК®и°•еБњеЭЧпЉМеЫ†ж≠§з©ЇйЧіеЯЯзЫЄйВїеЭЧзЪДињРеК®еРСйЗПеЕЈжЬЙиЊГеЉЇзЪДзЫЄеЕ≥жАІгАВиЛ•дљњзФ®зЫЄйВїеЈ≤зЉЦз†БеЭЧеѓєељУеЙНеЭЧMVињЫи°МйҐДжµЛпЉМе∞ЖдЇМиАЕеЈЃеАЉињЫи°МзЉЦз†БпЉМеИЩдЉЪе§ІеєЕеЇ¶иКВзЬБзЉЦз†БMVжЙАйЬАзЪДжѓФзЙєжХ∞гАВеРМжЧґпЉМзФ±дЇОзЙ©дљУињРеК®еЕЈжЬЙињЮзї≠жАІпЉМеЫ†ж≠§зЫЄйВїеЫЊеГПеРМдЄАдљНзљЃзЪДMVдєЯеЕЈжЬЙдЄАеЃЪзЪДзЫЄеЕ≥жАІгАВеЬ®H.264дЄ≠е∞±дљњзФ®дЇЖз©ЇеЯЯеТМжЧґеЯЯдЄ§зІНMVйҐДжµЛжЦєеЉПгАВ
¬† ¬† ¬†еЬ®HEVCдЄ≠пЉМдЄЇдЇЖеЕЕеИЖеИ©зФ®з©ЇеЯЯеТМжЧґеЯЯзЫЄйВїеЭЧзЪДMVеѓєељУеЙНеЭЧзЪДMVињЫи°МйҐДжµЛдї•дЊњиКВзЬБMVзЪДзЉЦз†БжѓФзЙєжХ∞пЉМHEVCеЬ®MVзЪДйҐДжµЛжЦєйЭҐжПРеЗЇдЇЖдЄ§зІНжЦ∞жКАжЬѓпЉЪMergeжКАжЬѓеТМAMVPпЉИAdvanced¬†Motion¬†Vector¬†PredictionпЉЙжКАжЬѓгАВ
¬† ¬† ¬†MergeжКАжЬѓеТМAMVPжКАжЬѓйГљдљњзФ®дЇЖз©ЇеЯЯеТМжЧґеЯЯMVйҐДжµЛзЪДжАЭжГ≥пЉМйАЪињЗеїЇзЂЛеАЩйАЙMVеИЧи°®пЉМйАЙеПЦжАІиГљжЬАдЉШзЪДдЄАдЄ™дљЬдЄЇељУеЙНPUзЪДйҐДжµЛMVпЉМдЇМиАЕзЪДеМЇеИЂдЄїи¶Би°®зО∞еЬ®дї•дЄЛдЄ§дЄ™жЦєйЭҐгАВ
пЉИ1пЉЙгАБMergeеПѓдї•зЬЛеЗЇжШѓдЄАзІНзЉЦз†Бж®°еЉПпЉМеЬ®иѓ•ж®°еЉПдЄЛпЉМељУеЙНPUзЪДMVзЫіжО•зФ±з©ЇеЯЯжИЦжЧґеЯЯдЄКдЄіињСзЪДPUйҐДжµЛеЊЧеИ∞пЉМдЄНе≠ШеЬ®MVDпЉЫиАМAMVPеПѓдї•зЬЛжИРдЄАзІНMVйҐДжµЛжКАжЬѓпЉМзЉЦз†БеЩ®еП™йЬАи¶БеѓєеЃЮйЩЕMVдЄОйҐДжµЛMVзЪДеЈЃеАЉињЫи°МзЉЦз†БпЉМеЫ†ж≠§жШѓе≠ШеЬ®MVDзЪДпЉЫ
пЉИ2пЉЙгАБдЇМиАЕеАЩйАЙMVеИЧи°®йХњеЇ¶дЄНеРМпЉМжЮДеїЇеАЩйАЙMVеИЧи°®зЪДжЦєеЉПдєЯжЬЙеМЇеИЂгАВ
2.1гАБMergeжКАжЬѓ
¬† ¬† ¬† Mergeж®°еЉПдЉЪдЄЇељУеЙНPUеїЇзЂЛдЄАдЄ™MVеАЩйАЙеИЧи°®пЉМеИЧи°®дЄ≠е≠ШеЬ®5дЄ™еАЩйАЙMVеПКеЕґеѓєеЇФзЪДеПВиАГеЫЊеГПгАВйАЪињЗйБНеОЖињЩ5дЄ™еАЩйАЙMVпЉМеєґињЫи°МзОЗ姱зЬЯдї£дїЈзЪДиЃ°зЃЧпЉМжЬАзїИйАЙеПЦзОЗ姱зЬЯдї£дїЈжЬАе∞ПзЪДдЄАдЄ™дљЬдЄЇиѓ•Mergeж®°еЉПзЪДжЬАдЉШMVгАВиЛ•иЊєиІ£з†БзЂѓдЊЭзЕІзЫЄеРМзЪДжЦєеЉПеїЇзЂЛиѓ•еАЩйАЙеИЧи°®пЉМеИЩзЉЦз†БеЩ®еП™йЬАи¶БдЉ†иЊУжЬАдЉШMVеЬ®еАЩйАЙеИЧи°®дЄ≠зЪД糥еЉХеН≥еПѓпЉМињЩж†Је§ІеєЕеЇ¶иКВзЬБдЇЖињРеК®дњ°жБѓзЪДзЉЦз†БжѓФзЙєжХ∞гАВMergeж®°еЉПеїЇзЂЛзЪДMVеАЩйАЙеИЧи°®дЄ≠еМЕеРЂдЇЖз©ЇеЯЯеТМжЧґеЯЯдЄ§зІНжГЕ嚥пЉМиАМеѓєдЇОB¬†SliceеИЩеМЕеРЂзїДеРИеИЧи°®зЪДжЦєеЉПгАВ
2.2гАБAMVPпЉИAdvanced¬†Motion¬†Vector¬†PredictionпЉЙжКАжЬѓ
¬† ¬† ¬† AMVPеИ©зФ®з©ЇеЯЯгАБжЧґеЯЯдЄКињРеК®зЯҐйЗПзЪДзЫЄеЕ≥жАІпЉМдЄЇељУеЙНPUеїЇзЂЛдЇЖеАЩйАЙйҐДжµЛMVеИЧи°®гАВзЉЦз†БеЩ®дїОдЄ≠йАЙеЗЇжЬАдЉШзЪДйҐДжµЛMVпЉМеєґеѓєMVињЫи°МеЈЃеИЖзЉЦз†БпЉЫиІ£з†БзЂѓйАЪињЗеїЇзЂЛзЫЄеРМзЪДеИЧи°®пЉМдїЕйЬАи¶БињРеК®зЯҐйЗПжЃЛеЈЃпЉИMVDпЉЙдЄОйҐДжµЛMVеЬ®иѓ•еИЧи°®дЄ≠зЪДеЇПеПЈеН≥еПѓзЃЧеЗЇељУеЙНPUзЪДMVгАВ
¬† ¬† ¬† з±їдЉЉдЇОMergeж®°еЉПпЉМAMVPеАЩйАЙMVеИЧи°®дєЯеМЕеРЂз©ЇеЯЯеТМжЧґеЯЯдЄ§зІНжГЕ嚥пЉМдЄНеРМзЪДжШѓAMVPеИЧи°®йХњеЇ¶дїЕдЄЇ2гАВ
3гАБе§ЪеПВиАГеЫЊеГПеПКеК†жЭГйҐДжµЛ
¬† ¬† ¬† еѓєдЇОжЯРдЇЫеЬЇжЩѓпЉМе¶ВзЙ©дљУеС®жЬЯжАІеПШеМЦз≠ЙпЉМе§ЪеПВиАГеЄІеПѓдї•е§ІеєЕжПРйЂШйҐДжµЛз≤ЊеЇ¶гАВжЧ©жЬЯзЪДиІЖйҐСзЉЦз†Бж†ЗеЗЖеП™жФѓжМБеНХдЄ™еПВиАГеЫЊеГПпЉМH.263+еЉАеІЛжФѓжМБе§ЪеПВиАГеЫЊеГПйҐДжµЛжКАжЬѓпЉМиАМH.264жЬАе§ЪжФѓжМБ15дЄ™еПВиАГеЫЊеГПпЉМйЪПзЭАеПВиАГжХ∞зЫЃзЪДеҐЮеК†пЉМзЉЦз†БжАІиГљдєЯйЪПдєЛжПРйЂШпЉМдљЖжШѓжПРйЂШзЪДйАЯеЇ¶жЧ•зЫКзЉУжЕҐпЉМеЫ†ж≠§дЄЇдЇЖжЭГи°°зЉЦз†БжХИзОЗеТМзЉЦз†БжЧґйЧіпЉМдЄАиИђйЗЗзФ®4~6дЄ™еПВиАГеЫЊеГПгАВ
¬† ¬† ¬†ж≠§е§ЦпЉМH.264ињШдљњзФ®дЇЖеК†жЭГйҐДжµЛжКАжЬѓгАВеК†жЭГйҐДжµЛи°®з§ЇйҐДжµЛеГПзі†еПѓдї•зФ®дЄАдЄ™пЉИйАВзФ®дЇОP¬†SliceжГЕ嚥пЉЙжИЦдЄ§дЄ™пЉИйАВзФ®дЇОB¬†SliceпЉЙеПВиАГеЫЊеГПдЄ≠зЪДеГПзі†йАЪињЗдЄОеК†жЭГз≥їжХ∞зЫЄдєШеЊЧеЗЇгАВHEVCж≤њзФ®дЇЖH.264дЄ≠зЪДеК†жЭГйҐДжµЛжКАжЬѓеєґеБЪдЇЖињЫдЄАж≠•зЪДеПСе±ХгАВ